项目介绍:
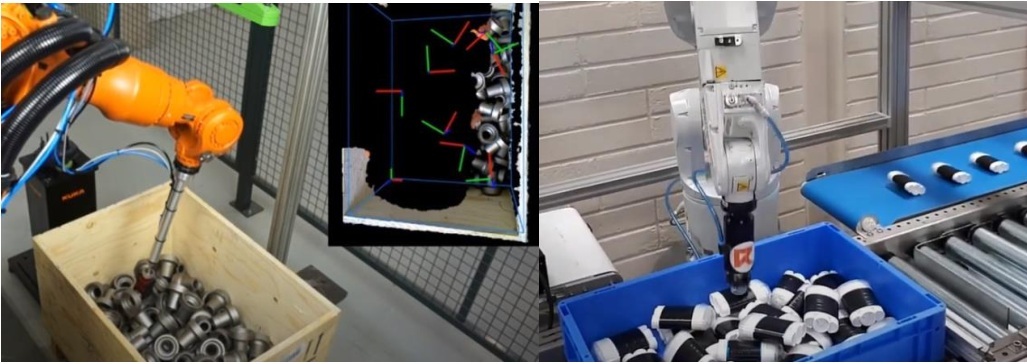
利用工业机器人或协作机器人,在非结构化环境中,针对无序摆放的、杂乱的堆积在一起的各种刚体物体,进行 6d 物体姿态识别,控制机器人实时进行路径规划,实现对物体的有效、稳定抓取操作。无序抓取是智能制造的典型应用,是智能产线的重要组成部分,也是工业机器人智能化的重要体现。机器人无序抓取随着 3D 相机的升级换代,并伴随深度学习6d 姿态评估技术的深入研究,使工业机器人可以工作在在非结构化环境下。 目前,在已经进入了一些工业和物流的应用场景。使机器人走出工厂,走进生活成为可能。
项目负责人:杨振(0412-5929378)